一、团队简介
“机器视觉与智能系统”团队主要开展智能装备、机器人与无人系统的基础与应用基础研究。致力于通过视觉感知和视觉认知技术为机器赋能,使机器获得类人的感知和认知能力,并进而实现自主智能。团队研究方向主要涉及视觉感知与认知计算模型与方法、特定任务的深度学习模型、专用智能机器人、无人自主系统(无人车、无人机等)、嵌入式视觉技术、机器视觉检测系统等领域的科学研究、技术开发和工程应用。
二、团队负责人简介
张东波,博士生导师。湖南省自动化学会副理事长、湖南省青年骨干教师,湖南省人工智能学会人工智能教育工作委员会常委,自动化学会模式识别与机器智能专委、混合智能专委;计算机学会计算机视觉专委、智能机器人专委;中国图象图形学会机器视觉专委,视觉认知与计算专委。湖南省先进制造业科技创新联盟技术委员会专家,宁乡高端装备制造产业专家指导委员,湘潭市科技创新智库专家。承担国家自科区域创新联合基金课题、湖南省战略性新兴产业科技攻关与重大成果转化项目课题、广东省基础与应用基础研究基金联合基金重点项目课题、省自然科学基金等项目20余项。在IEEE RAL、IEEE JBHI、Neurocomputing、自动化学报,电子学报,软件学报、IROS等国内外权威期刊和会议发表论文100多篇,其中TOP期刊和一级学报论文20余篇。
三、团队骨干介绍
目前团队拥有8名专职科研人员,包括张东波、朱江、汤红忠等3位教授,张莹、许海霞、印峰、孟步敏等4位副教授,缪慧司等年轻老师1位。团队成员分别来自控制科学与工程、电子信息、信息与通信工程等专业。团队已经发展成为一支年龄结构合理、知识专业技能互补、合作密切、创新能力突出的科研群体。
四、主要研究方向
1计算机视觉中的模式识别、机器学习理论与方法
研究基于统计学习理论的模式识别领域特征提取、特征学习方法;视觉感知与认知计算模型、学习理论与方法;基于视觉的图像分析与理解、目标检测与识别的方法与技术。
2智能机器人
面向家居或办公场所的专用高智能自主服务机器人,开展基于视觉认知的机器人理论与技术研究,开展基于视觉的认知计算模型、方法与技术研究,例如基于视觉认知的行为决策、运动规划、环境建模与定位导航等。
3机器视觉检测系统与装置
集成计算机视觉、图像处理、机器学习、模式识别、嵌入式系统、电气控制等技术,研制工业产品质量在线检测系统与装置,无人自主系统的嵌入式视觉装置。
五、科研平台

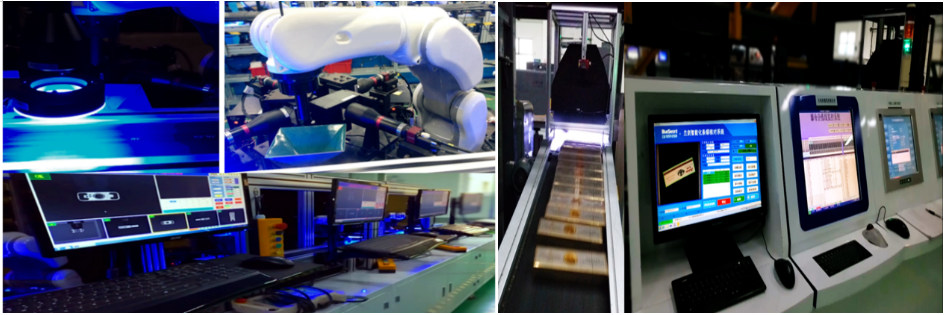
团队主要依托“机器人视觉感知与控制技术”国家工程研究中心和“智能制造”湖南省高校重点实验室。团队下设智能机器人、机器视觉、智能网联车三个研究室。团队成员曾获得中国包装总公司科技进步一等奖、中国机械工业科学技术二等奖、湖南省科技进步二等奖。开发的机器视觉应用系统在上海、江苏、河北、山东、广东、深圳以及湖南等地20余家企业得到推广应用,达到了提升企业效益、降低劳动力成本、促进智能化生产水平的目的,同时为服务智能制造,打造智能工厂发挥了重要作用。
一、科研项目
近5年来,团队承担国家自然科学基金项目,国家自然科学基金区域创新联合基金课题,湖南省战略性新兴产业科技攻关与重大成果转化项目,湖南省重点研发计划、广东省基础与应用基础基金联合基金重点项目,湖南省JMRH项目,湖南省自然科学基金项目、校企合作产学研项目等总计40余项。累积经费达1500多万元。

